# Архитектура компьютера ## Лекция 10 ## Ввод-вывод. PMIO. MMIO. Polling Пенской А.В., 2026 --- <div class="row"><div class="col"> ## Устройство ввода-вывода Типовое взаимодействие: 1. конфигурация устр./доступа; 1. проверка состояния; 1. отправка данных; 1. проверка статуса ответа; 1. чтение ответа. Примеры устройств: диоды, ключи, клавиатуры, таймеры, часы, сопроцессоры, диски, и т.п. </div><div class="col"> 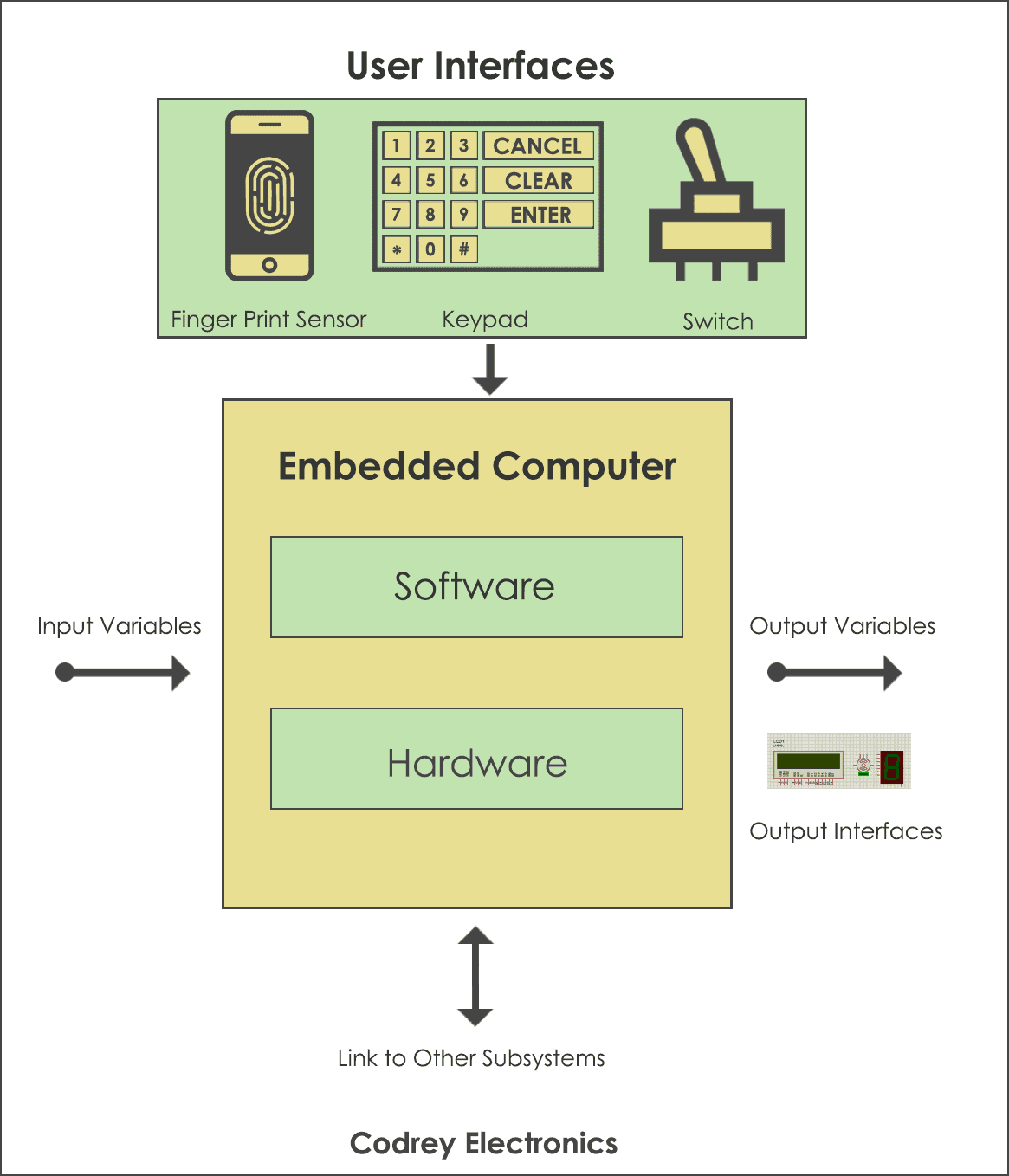 <!-- .element height="420px" --> </div></div> ---- <div class="row"><div class="col"> ## Устройство ввода-вывода. Интерфейс CPU <div> 1. регистры данных; 1. регистры статуса; 1. протокол взаимодействия. </div> <!-- .element: class="fragment" --> </div><div class="col"> 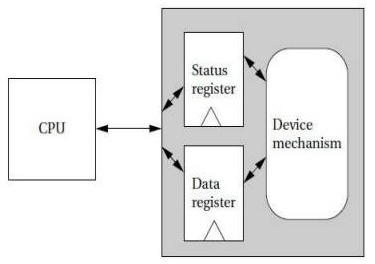 <!-- .element height="220px" --> </div></div> --- ## Ввод-вывод с точки зрения ISA Как выглядят операции ввода-вывода с точки зрения CPU? 1. Ввод-вывод через порты. Port-Mapped I/O (PMIO) 1. Ввод-вывод через память. Memory-Mapped I/O (MMIO) 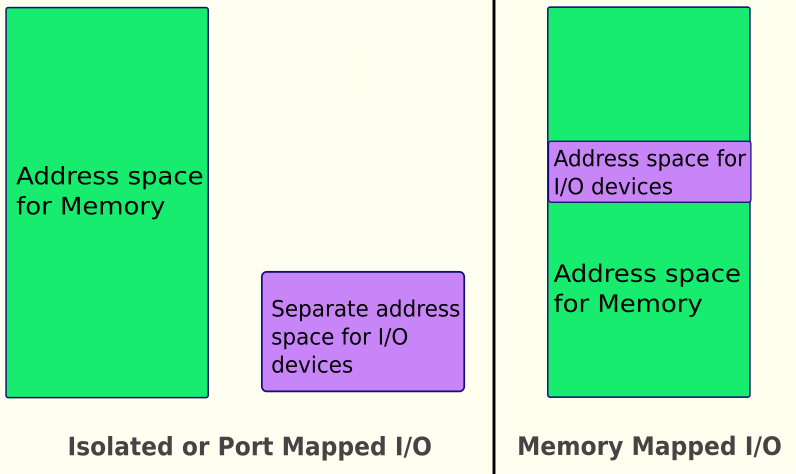 <!-- .element height="400px" --> ---- ### Ввод-вывод через порты. <br/> Port-Mapped I/O (PMIO) - Ввод-вывод через спец. инструкции: `in 11; out 12;` - Адресация регистров ввода-вывода не зависит от адресации памяти (Isolated I/O). <div class="row"><div class="col"> #### Достоинства PMIO 1. Минимизация логики управления (малое адресное пространство). Оптимизация IO. 2. Ввод-вывод и доступ к памяти разделены. 3. Адресное пространство памяти однородно. 4. Простота системы в целом. </div><div class="col"> #### Недостатки PMIO 1. Усложнение ISA и процессора. 2. Данные ввода-вывода — данные второго сорта (особенно для CISC процессоров). 3. "Лишние" копирования данных. 4. Очередное адресное пространство. </div></div> ---- ### Ввод-вывод через память. <br/> Memory-Mapped I/O (MMIO) <div class="row"><div class="col"> 1. Регистры внешних устройств отображаются в адресное пространство памяти. 1. Ввод-вывод реализуется через инструкции доступа к памяти. </div><div class="col"> 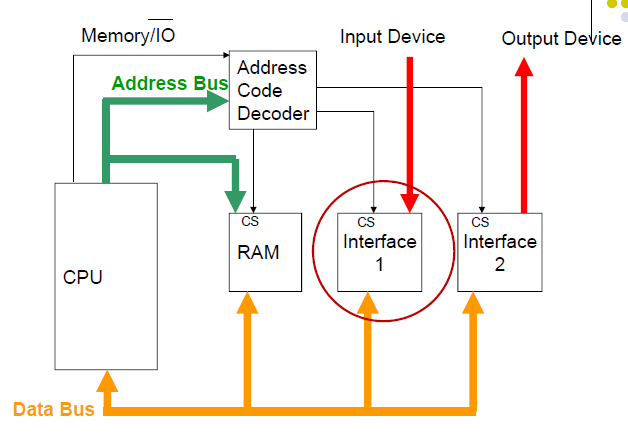 </div></div> ---- <div class="row"><div class="col"> #### Достоинства MMIO 1. Простота процессора. Без изменения микроархитектуры. 1. Единый набор механизмов доступа: автоинкремент, векторные операции, работа с барьерами. 1. Обработка данных без переноса в память. 1. Адресное пространство памяти. </div><div class="col"> #### Недостатки MMIO 1. Одна шина для ввода-вывода и памяти. Разница скорости шин. 1. Неоднородность памяти, сложная конфигурация системы. 1. Избыточный адрес для устройств ввода-вывода. 1. Проблемы с параллелизмом уровня инструкций и кешами: - flush при вводе-выводе; - порядок записи регистров. </div></div> --- ## Варианты ввода-вывода <div class="row"><div class="col"> 1. **Программно-управляемый ввод-вывод** — операции реализуются процессором. Все действия реализуются через инструкции процессора. 2. **Ввод-вывод по прерыванию**. Снимает с процессора задачу наблюдения и позволяет это реализовать по внешнему событию. 3. **Channel I/O** и **прямой доступ к памяти** (Direct Memory Access — DMA). Процессор ставит задачу и оповещается по готовности. </div><div class="col"> 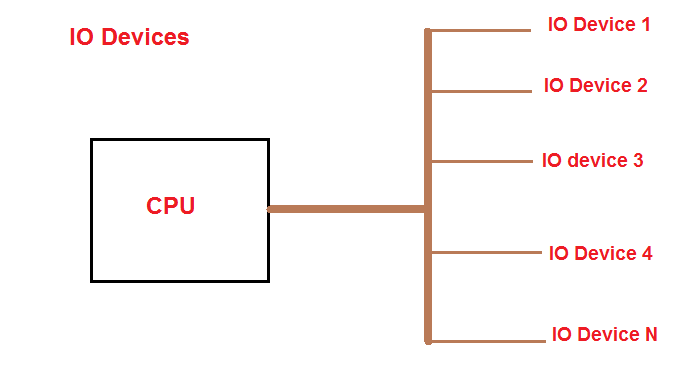 </div></div> --- ## Программно-управляемый <br/> ввод-вывод Работа с вводом-выводом управляется единым потоком управления. Типичный подход к программированию: polling. 1. Наблюдаем за состоянием устройства ввода-вывода. 2. Реагируем. ------------------------- Рассмотрим на примерах: 1. Работа с ключом. 1. SPI. 1. Имитация параллелизма. ---- ### Пример: работа с ключом /1 <div class="row"><div class="col"> Задача: посчитать количество нажатий на ключ (кнопку). ```python counter = 0 while True: if switch() == 1: counter += 1 ``` Будет работать? </div><div class="col"> 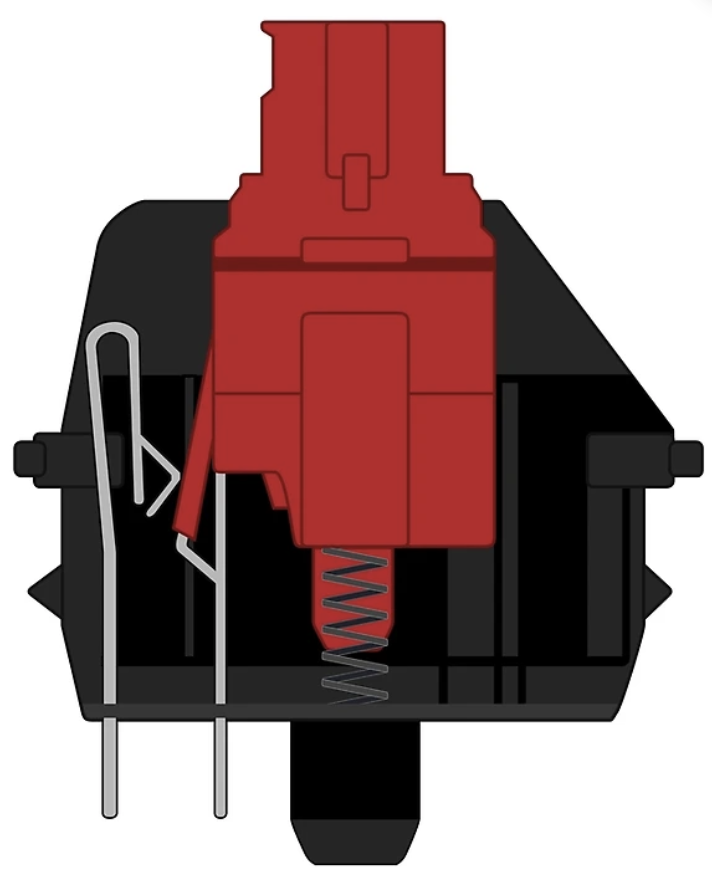 <!-- .element height="260px" --> </div></div> <div> <div class="row"><div class="col"> 1. Нет, это не сигнал, это уровень. Нажатие — поднял и опустил. 2. Нет, есть дребезг контактов. </div><div class="col">  <!-- .element height="250px" --> </div></div> </div> <!-- .element: class="fragment" --> ---- ### Пример: работа с ключом /2 ```python counter = 0 switch_prev = switch() def sleep(ms): begin = now() while now() - begin < ms: pass while True: switch_cur = switch() if switch_prev != switch_cur: if switch_cur == 1: sleep(200) # ms switch_cur = switch() if switch_cur == 1: counter += 1 switch_prev = switch_cur if switch_cur == 0: sleep(200) # ms switch_cur = switch() if switch_cur == 0: switch_prev = switch_cur ``` - `switch_prev` для обнаружения отпускания кнопки. - `sleep` и повторная проверка позволяет избежать дребезга. Проблемы? ---- #### Программно-управляемый ввод-вывод. Проблемы 1. Занимает процессор, включая имитацию таймера. 1. Процессор (алгоритм) должен регистрировать сигнал на частоте в два раза выше частоты сигнала (теорема Котельникова). 1. Высокое энергопотребление. 1. Как работать с клавиатурой? 1. Как совмещать с другими задачами? 1. Как быть со сложным протоколом ввода-вывода (пример на следующем слайде)? --- #### Пример: Serial Peripheral Interface (SPI)  - **MOSI** (Master Out Slave In) или COPI — выход ведущего, вход ведомого. Передача данных от ведущего устройства ведомому. - **MISO** (Master In Slave Out) или CIPO — вход ведущего, выход ведомого. Передача данных от ведомого устройства ведущему. - **SCLK** (Serial Clock) или SCK — последовательный тактовый сигнал. Передача тактового сигнала для ведомых устройств. - **CS** (Chip Select) или SS (Slave Select) — выбор микросхемы, выбор ведомого. ---- <div class="row"><div class="col"> ##### Временная диаграмма SPI 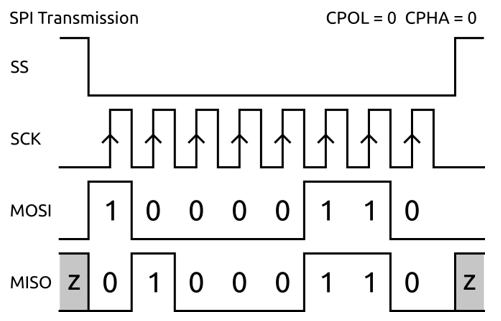 (один из возможных вариантов) </div><div class="col"> ##### Устройство SPI передатчиков 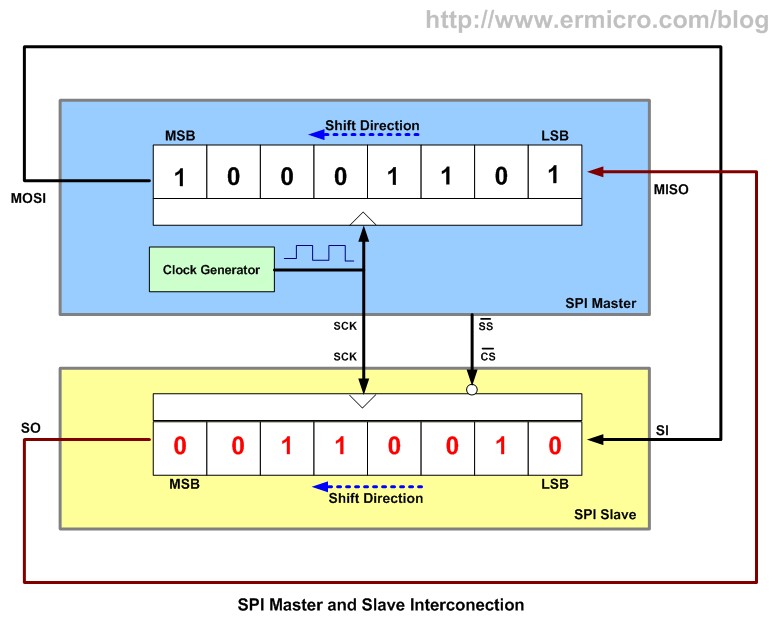 </div></div> Почему сигнал `CS` устанавливает по нулевому значению? <div> `CS` часто подключается к сигналу `Reset`, тем самым включая устройство на время взаимодействия. </div> <!-- .element: class="fragment" --> --- ### Параллелизм ввода-вывода <br/> через конечные автоматы Задача: посчитать количество нажатий на два ключа одновременно. Варианты реализации: 1. Усложняем цикл, наблюдая сразу за 2 кнопками. <br/> Решаем проблему одновременного наблюдения. 1. **Разрываем поток управления через конечный автомат.** 1. Используем прерывания (к ним мы вернёмся позже). ---- <div class="row"><div class="col"> #### Пример: работа с <br/> 2 ключами /1 Разрываем код цикла в конечный автомат для счётчика. 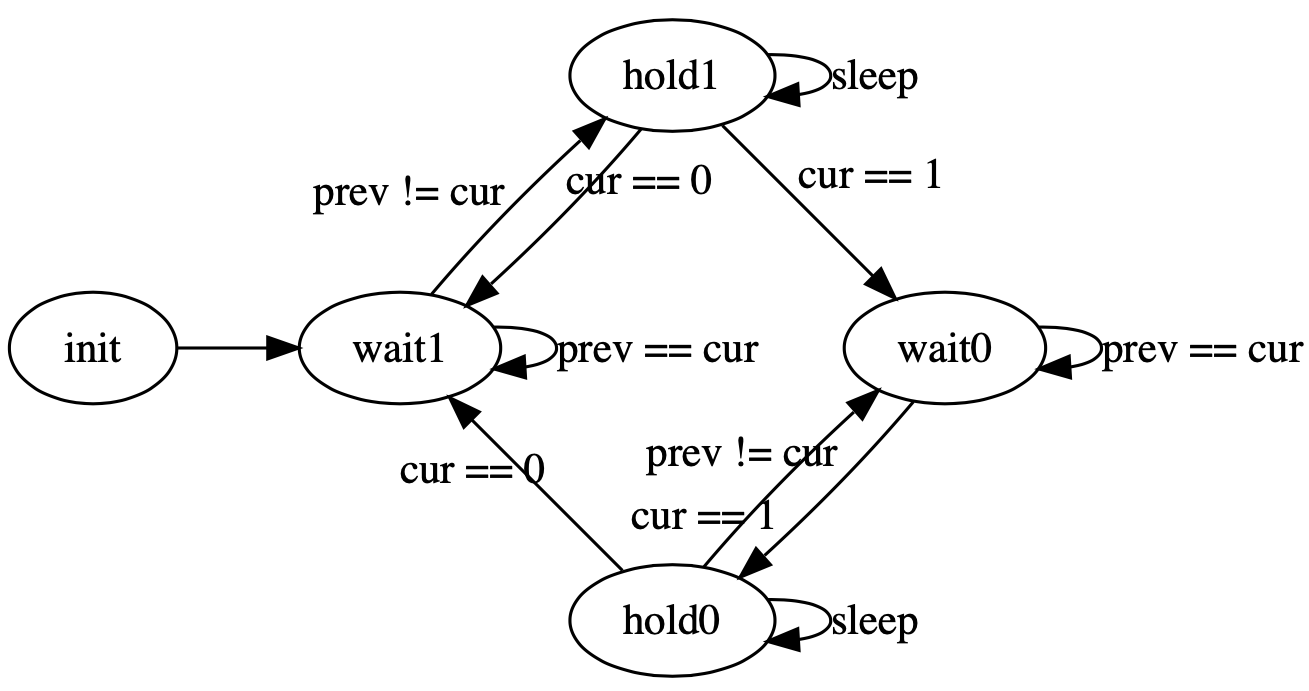 ```python class Counter(): def __init__(self): self.state = 'wait1' self.counter = 0 self.begin = None self.switch_prev = 0 ``` </div><div class="col"> Оригинальный цикл: ```python counter = 0 switch_prev = switch() def sleep(ms): begin = now() while now() - begin < ms: pass while True: switch_cur = switch() if switch_prev != switch_cur: if switch_cur == 1: sleep(200) # ms switch_cur = switch() if switch_cur == 1: counter += 1 switch_prev = switch_cur if switch_cur == 0: sleep(200) # ms switch_cur = switch() if switch_cur == 0: switch_prev = switch_cur ``` </div></div> ---- <div class="row"><div class="col"> ##### Пример: работа с <br/> 2 ключами /2 Разрываем код цикла в конечный автомат для счётчика.  ```python class Counter(): def __init__(self): self.state = 'wait1' self.counter = 0 self.begin = None self.switch_prev = 0 ``` </div><div class="col"> Логика управляющего автомата: ```python def process(self, switch_cur): if self.state == 'wait1': if self.switch_prev != switch_cur: self.state = 'hold1' self.begin = now() elif self.state == 'hold1': if now() - self.begin > delay: if switch_cur == 0: self.state = 'wait1' self.begin = None elif switch_cur == 1: self.state = 'wait0' self.counter += 1 self.begin = None self.switch_prev = 1 elif self.state == 'wait0': if self.switch_prev != switch_cur: self.state = 'hold0' self.begin = now() elif self.state == 'hold0': if now() - self.begin > delay: if switch_cur == 0: self.state = 'wait1' self.begin = None self.switch_prev = 0 elif switch_cur == 1: self.state = 'wait0' self.begin = None ``` </div></div> Notes: ```dot digraph G { init -> wait1; wait1 -> wait1[label="prev == cur"]; wait1 -> hold1[label="prev != cur"]; hold1 -> hold1[label="sleep"]; hold1 -> wait1[label="cur == 0"]; hold1 -> wait0[label="cur == 1"]; wait0 -> wait0[label="prev == cur"]; wait0 -> hold0[label="prev != cur"]; hold0 -> hold0[label="sleep"]; hold0 -> wait0[label="cur == 1"]; hold0 -> wait1[label="cur == 0"]; } ``` ---- ##### Пример: работа с 2 ключами /3 Запускаем счётчики в "параллельную" работу. ```python counter1 = Counter() counter2 = Counter() while True: counter1.process(switch1()) counter2.process(switch2()) ``` Особенности реализации: 1. ООП и Python для простоты. Тривиально переписать на C. 2. `now()` — лучше вынести из автоматов на уровень общего цикла (тестирование, эффективность). 3. Инициализация некорректна: `self.switch_prev = 0` вместо `self.switch_prev = switch()` — при старте нужно читать реальное состояние кнопки. 4. Многие проблемы сохранились: нагрузка, требования к частоте, энергопотребление. 5. По сути — это пример кооперативной многозадачности. Перейдём к многозадачности. ---